Distributed Reinforcement Learning of Targeted Grasping with Active Vision for Mobile Manipulators Preferred Networks 0:49 4 years ago 1 584 Далее Скачать
Reinforcement learning of grasping a deformable object Robotic Manipulation for Sort and Segregation 1:47 4 years ago 133 Далее Скачать
Active vision for grasp planning PaCMan FP7 Project (Probabilistic and Compositional Representations for Object Manipulation) 1:04 8 years ago 39 Далее Скачать
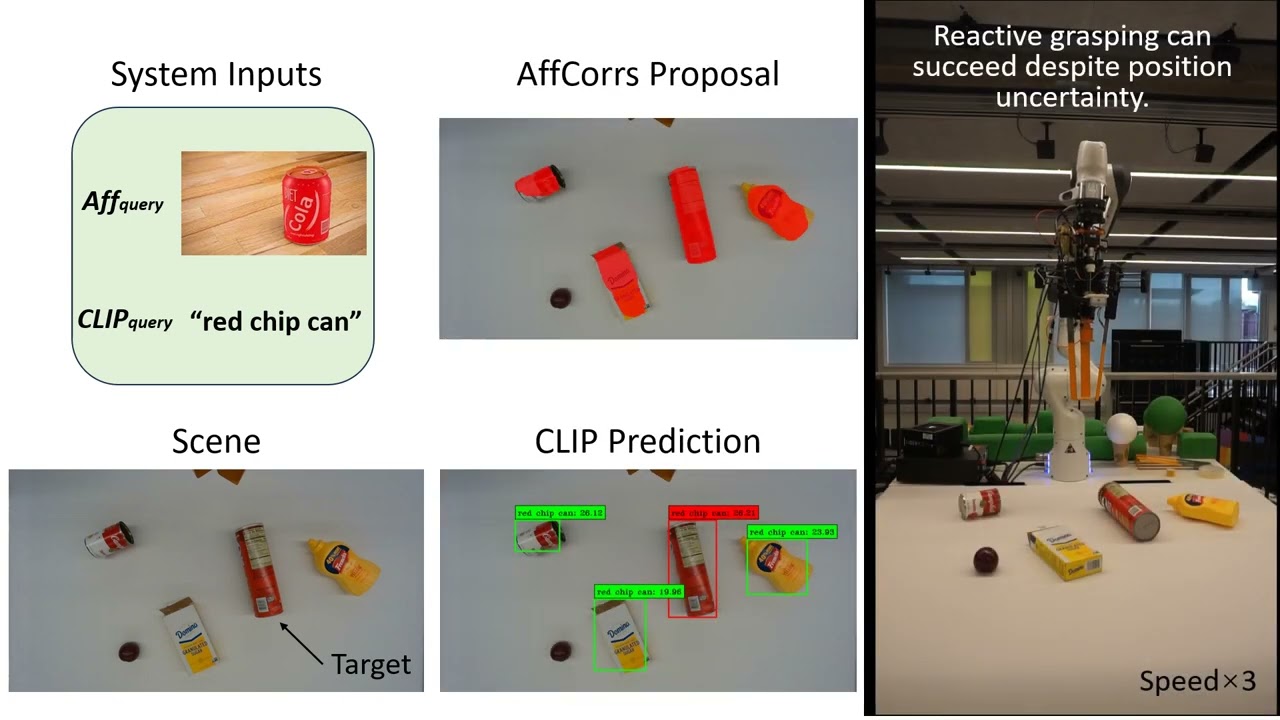
Reinforcement Learning-based Grasping via One-Shot Affordance Localization Robot Perception and Learning (RPL) 2:34 1 year ago 219 Далее Скачать
Fully Autonomous Real-World Reinforcement Learning with Applications to Mobile Manipulation Glen Berseth 3:49 1 year ago 151 Далее Скачать
Training a mobile manipulator to follow crop lines with reinforcement learning JJ RG 0:32 5 years ago 56 Далее Скачать
Deep Reinforcement Learning for Vision-Based Robotic Grasping: A Simulated Comparative Evaluation of ICRA 2018 2:37 6 years ago 4 467 Далее Скачать
Learning Continuous Control Actions for Robotic Grasping with Reinforcement Learning Loris Roveda 1:58 4 years ago 747 Далее Скачать
Never Stop Learning: The Effectiveness of Fine-Tuning in Robotic Reinforcement Learning Ryan Julian 9:36 4 years ago 2 076 Далее Скачать
"Active and Interactive Mapping with Dynamic GPIS for Mobile Manipulators", RA-L+ICRA 2021 Liyang Liu 9:43 3 years ago 83 Далее Скачать
Learning-based Multi-View Exploration for Grasp Detection Aaron Song 0:52 4 years ago 39 Далее Скачать
ReLMoGen [Explained] Leveraging Motion Generation in Reinforcement Learning for Mobile Manipulation Andrew Melnik 11:27 2 years ago 215 Далее Скачать
Living Object Grasping using Two-stage Graph Reinforcement Learning Zhe Hu 0:46 4 years ago 113 Далее Скачать
Total Singulation with Modular Reinforcement Learning Automation & Robotics Lab - Aristotle University of Thessaloniki 2:28 3 years ago 219 Далее Скачать
CoRL2024 workshop: Learning Robot Fine and Dexterous Manipulation:Perception and Control Xiao GAO 4:48:00 1 month ago 767 Далее Скачать
Deep learning-based method for vision-guided robotic grasping of unknown objects. Mario Sposato 1:29 4 years ago 142 Далее Скачать